相机云台设置
云台一般有两种连接方式,最简单的一种就是直接接在遥控器接收机上,通过接收机给云台发送pwm信号,控制云台。第二种就是通过飞控把遥控信号映射到飞控输出通道上,下面我们讲解一下第二种方法的软件设置。
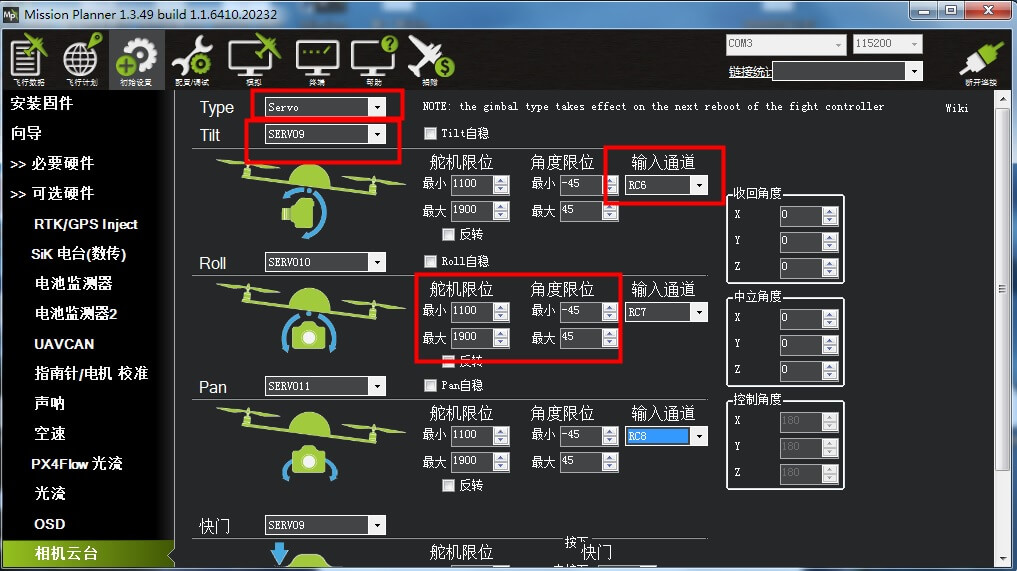 上图示例为遥控器通道6、7、8分别映射到飞控AUX1、AUX1、AUX3通道控制云台的TILT、roll、pan轴。
上图示例为遥控器通道6、7、8分别映射到飞控AUX1、AUX1、AUX3通道控制云台的TILT、roll、pan轴。
- 将pixhack/pixhawk连接上mission planner
- 打开初始设置》可选硬件》相机云台》type设置成servo>tilt下拉设置成servo9,输入通道设置成rc6;按照相同方式设置roll以及pan轴(如果是三轴云台)。
- 不要勾选自稳复选框。
飞控执行Do-Set-ROI命令时云台应该工作,舵机限位及角度限位一般采用默认,也可根据云台及相机实际情况作出调整。
测试云台设置
测试飞行员对云台的控制
一旦启动,当您的发射器的通道6调节旋钮处于最小pwm值(可能约为1000)时,云台应指向倾斜角度最小(即摄像头向下),当 调谐旋钮处于最大(可能约为2000),相机应指向其最大倾斜角度(即摄像头向上),mission planner的无线电校准页面可用于检查Ch6的当前输入pwm值。
测试ROI
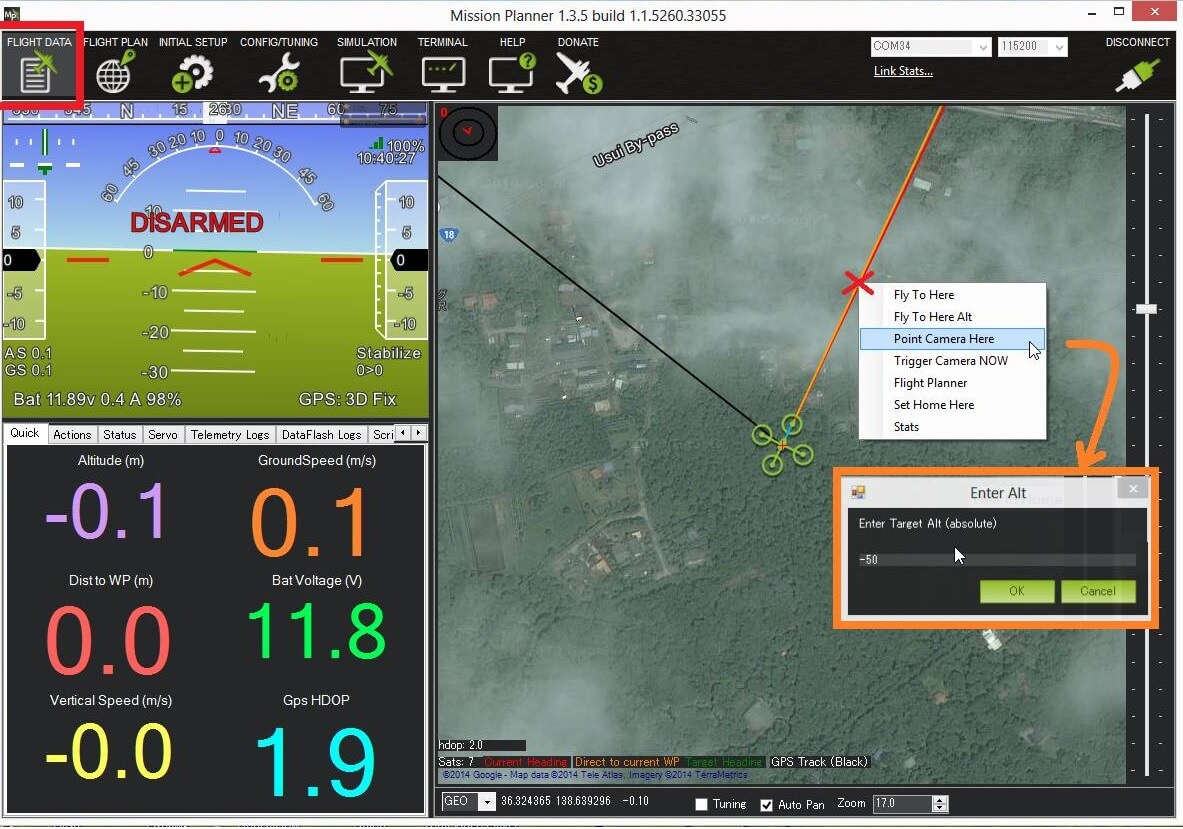
测试roi需要gps定位。 ROI特征指示飞行器和/或相机指向目标。 上面的说明描述了设置pixhack / Pixhawk,以便它控制云台的俯仰的倾斜,这样当接收到Do-Set-ROI命令时,转向器将尝试将飞行器指向 目标和倾斜摄像机取决于飞行器与目标的距离和高度。 您可以通过与mission planner连接来正确测试云台倾斜运动,然后在飞行数据屏幕的地图上,右键单击飞行器前方约50米的点(橙色和红线显示车辆的当前航向 ),选择“拍照点”,输入高度-50(米)。 这应该使云台指向约45度。